▌Часть I: Привод как нервная система робота
Каждое роботизированное движение — от хирургических манипуляций на микронном уровне до высокоскоростной логистической сортировки — происходит в суставном приводе. Тем не менее, выбор привода часто рассматривается как задача закупок, а не как инженерная проблема системного уровня.
В действительности привод двигателя шарнира робота должен одновременно управлять пульсациями крутящего момента, тепловым поведением, задержкой энкодера, гармониками зубчатого зацепления и стабильностью замкнутого контура. Любой недостаток одного параметра распространяется на всю кинематическую цепь, ухудшая точность и повторяемость.
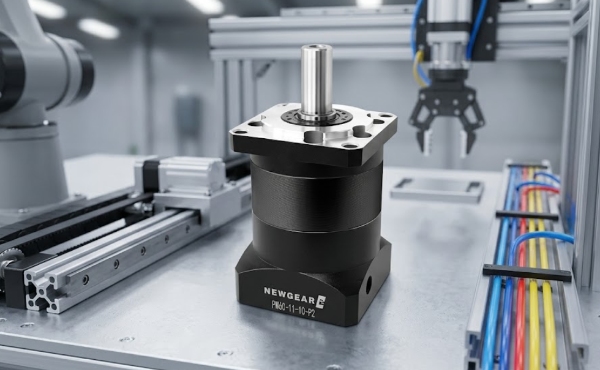
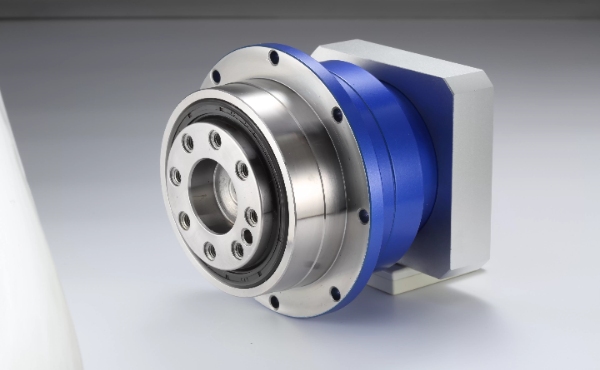
Роботизированный привод двигателя ND-A5216-10, разработанный iHF Group, решает эту проблему путем интеграции двигателя, планетарного редуктора и обратной связи с двойным энкодером в единую совместно разработанную систему, а не отдельные компоненты. Это устраняет потери на интерфейсе и улучшает динамическую согласованность во всех режимах работы.

▌Часть II: Техническая разборка ND-A5216-10
2.1 Электромагнитная конструкция: подавление крутящего момента
Ключевой проблемой в точном движении является зубчатый момент, вызванный взаимодействием ротора и статора. Он создает низкоскоростную пульсацию скорости, позиционные колебания и акустический шум.
ND-A5216-10 смягчает это за счет оптимизированной геометрии пазов и конструкции ротора с перекошенным магнитом. Оптимизация конечных элементов обеспечивает плавный выходной крутящий момент даже ниже 100 об/мин, что является критическим диапазоном для точной сборки, контроля усилия и деликатных задач по вставке.
2.2 Планетарный редуктор: люфт <3 угловых минут
Привод оснащен высокоточным косозубым планетарным редуктором с люфтом менее 3 угловых минут (0,05°). На рычаге длиной 1 метр это соответствует отклонению кончика <0,87 мм только от люфта шестерни.
Косозубые шестерни обеспечивают прогрессивное зацепление, обеспечивая:
● Более высокая плотность крутящего момента, чем у цилиндрических шестерен.
● Снижение передачи вибрации.
● Снижение акустической эмиссии для создания безопасной для человека среды.
По сравнению с прямозубыми системами винтовая планетарная передача улучшает плавность хода и распределение нагрузки, повышая структурную стабильность и динамический отклик.
2.3 Архитектура с двумя кодировщиками
В отличие от систем с одним энкодером, которые определяют выходное движение посредством передаточных чисел, ND-A5216-10 использует двойные энкодеры:
● Энкодер на стороне двигателя для коммутации и управления скоростью.
● Энкодер на стороне выхода для истинного положения вала.
Это устраняет совокупные ошибки, связанные с люфтом, податливостью при кручении и тепловым расширением. Он также обеспечивает диагностику в режиме реального времени путем сравнения отклонений положения двигателя и выходного сигнала, что позволяет заблаговременно обнаружить механический износ.
2.4 Единое управление с обратной связью
Привод поддерживает одновременное регулирование крутящего момента, скорости и положения посредством каскадных контуров управления:
● Контур крутящего момента: полоса пропускания 1–5 кГц.
● Контур скорости: 200–500 Гц.
● Контур положения: 50–200 Гц.
Обратная динамика с прямой связью компенсирует инерцию и нелинейные эффекты, уменьшая ошибку отслеживания во время быстрого ускорения. Это позволяет плавно переключаться между высокоскоростным движением и совместимым управлением усилиями без смены режимов.

▌Часть III: Динамические и температурные характеристики
3.1 Быстрое изменение направления
Во времени цикла в робототехнике часто преобладают замедление и разворот, а не максимальная скорость. ND-A5216-10 уменьшает задержку реверса за счет:
● Низкая инерция ротора.
● Высокая пропускная способность токового контура.
● Контролируемое механическое соответствие зубчатой передачи.
Это сводит к минимуму колебания и повышает производительность систем захвата, сварки и контроля.
3.2 Управление температурой
Термическая стабильность имеет решающее значение при непрерывной работе. Повышение температуры увеличивает сопротивление, уменьшает константу крутящего момента и ускоряет старение изоляции.
Привод решает эту проблему посредством:
● Конструкция статора с высоким коэффициентом заполнения медью.
● Теплопроводящие герметизирующие материалы.
● Ребристый алюминиевый корпус для улучшения конвекции.
Эти функции уменьшают снижение номинальных характеристик и поддерживают стабильный выходной крутящий момент в режиме 24/7.
▌Часть IV: Домены приложений
4.1 Точное производство
В микросборочном и электронном производстве требования к точности достигают ±0,02–0,05 мм. ND-A5216-10 обеспечивает это благодаря низкому люфту, двойной обратной связи и плавному выходному крутящему моменту. Он особенно эффективен в лучезапястных суставах многоосных роботизированных манипуляторов для выполнения задач точной ориентации.
4.2 Совместная робототехника
Коботы должны соответствовать ограничениям по усилию ISO/TS 15066, сохраняя при этом производительность. Низкое трение привода, быстрая реакция на крутящий момент и малошумная конструкция обеспечивают безопасное взаимодействие с человеком. Винтовая передача снижает акустическую мощность, повышая удобство использования на рабочем месте.
4.3 Автоматизация логистики
В автоматических транспортных средствах и системах сортировки адаптация имеет важное значение. Управление в режиме крутящего момента позволяет обрабатывать различные полезные нагрузки — от хрупких предметов до тяжелых посылок — без замены оборудования. Быстрое ускорение и замедление напрямую повышают эффективность пропускной способности.
4.4 Инспекционные и лабораторные системы
Метрология и контроль полупроводников требуют условий со сверхнизким уровнем вибрации. Балансировка ротора привода и плавное зацепление шестерни сводят к минимуму передачу вибрации, обеспечивая стабильность измерений на соседнем чувствительном оборудовании.
▌Часть V: Инженерная философия группы iHF
В iHF Group разработка приводов следует философии совместного проектирования на системном уровне:
● Оптимизация плотности крутящего момента в электромагнитной, тепловой и механической областях.
● Мультифизическое моделирование для раннего устранения помех и насыщения.
● Контроль вибрации на уровне системы, объединяющий привод и конструкцию.
● Механическая конструкция с учетом управления для улучшения динамического отклика.
● Проверка долговечности на основе IEC 60068 для обеспечения промышленной надежности.
ND-A5216-10 — это не отдельный компонент, а часть совместно оптимизированной системы движения, предназначенной для интеллектуальных производственных сред.
▌Часть VI: Рыночный контекст
Рынок приводов для робототехники быстро расширяется благодаря:
● Автоматизация Индустрии 4.0 и гибкие производственные системы.
● Рост коллаборативной робототехники в общей человеческой среде.
● Миниатюризация промышленного оборудования.
● Требование более высокой плотности крутящего момента в компактных помещениях.
В этом контексте встроенные приводы, такие как ND-A5216-10, уменьшают сложность системы за счет объединения двигателя, редуктора и датчиков в одной архитектуре, ускоряя циклы разработки OEM и повышая надежность.
❓ Часто задаваемые вопросы
Вопрос 1: Чем ND-A5216-10 отличается от систем двигатель + коробка передач?
Он объединяет двигатель, планетарный редуктор и двойные энкодеры в совместно разработанную систему, устраняя ошибки выравнивания и повышая точность замкнутого контура.
В2: какова его производительность по люфту?
Менее 3 угловых минут, что соответствует ошибке позиционирования в пределах субмиллиметра на длинных роботизированных манипуляторах.
В3: Почему двойные кодеры?
Они устраняют ошибки вывода путем прямого измерения положения выходного сигнала, повышая точность траектории и обеспечивая профилактическое обслуживание.
В4: Поддерживается ли управление крутящим моментом?
Да. Привод поддерживает управление крутящим моментом, скоростью и положением в реальном времени с высокой пропускной способностью, подходящей для приложений, чувствительных к силе.
В5: Подходит ли он для коботов?
Да. Низкий уровень шума, совместимое управление крутящим моментом и быстрый отклик делают его подходящим для совместной работы человека и робота.
Вопрос 6: Какие преимущества это дает в логистических системах?
Адаптивное управление крутящим моментом позволяет обрабатывать смешанные полезные нагрузки различной массы и хрупкости без внесения изменений в оборудование.
Вопрос 7: Какую поддержку предоставляет iHF Group?
Модели САПР, данные о крутящем моменте и скорости, термический анализ и инженерная поддержка на уровне приложений для интеграции OEM.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Запросить цену
Запросить цену